|
|
| МОК: | 1 |
| Цена: | US $3500.00 - 4900.00/ Set |
| стандартная упаковка: | Картонная коробка/деревянный ящик |
| Срок доставки: | 6~8 недель |
| Метод оплаты: | Т/Т |
| Пропускная способность: | 500 комплектов в год |
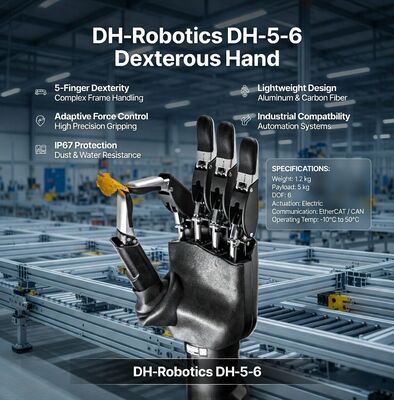
DH-Robotics DH-5-6 — это 5-пальцевая ловкая роботизированная рука с 6 активными степенями свободы, приводимая в движение тросами. Она разработана для гуманоидных роботов, коллаборативных роботов и исследовательских платформ, которым требуется захват, управление силой и восприятие, аналогичные человеческим. Рука использует интегрированные микролинейные приводы и поддерживает гибридное управление положением и силой для точной и податливой манипуляции.
| Параметр | Спецификация |
|---|---|
| Пальцы | 5 пальцев (антропоморфные) |
| Активные степени свободы | 6 |
| Общее количество суставов | 12 |
| Система привода | Тросовый привод с микролинейными актуаторами |
| Сенсоры | Датчики силы / тактильные датчики |
| Режим управления | Гибридное управление положением + силой |
| Связь | CAN / RS485 / EtherCAT |
| Вес | Приблизительно 400–550 г |
| Сила захвата пальца | 5–15 Н на палец (типично) |
Пожалуйста, укажите:
|
|
| МОК: | 1 |
| Цена: | US $3500.00 - 4900.00/ Set |
| стандартная упаковка: | Картонная коробка/деревянный ящик |
| Срок доставки: | 6~8 недель |
| Метод оплаты: | Т/Т |
| Пропускная способность: | 500 комплектов в год |
DH-Robotics DH-5-6 — это 5-пальцевая ловкая роботизированная рука с 6 активными степенями свободы, приводимая в движение тросами. Она разработана для гуманоидных роботов, коллаборативных роботов и исследовательских платформ, которым требуется захват, управление силой и восприятие, аналогичные человеческим. Рука использует интегрированные микролинейные приводы и поддерживает гибридное управление положением и силой для точной и податливой манипуляции.
| Параметр | Спецификация |
|---|---|
| Пальцы | 5 пальцев (антропоморфные) |
| Активные степени свободы | 6 |
| Общее количество суставов | 12 |
| Система привода | Тросовый привод с микролинейными актуаторами |
| Сенсоры | Датчики силы / тактильные датчики |
| Режим управления | Гибридное управление положением + силой |
| Связь | CAN / RS485 / EtherCAT |
| Вес | Приблизительно 400–550 г |
| Сила захвата пальца | 5–15 Н на палец (типично) |
Пожалуйста, укажите: