|
|
| МОК: | 1 |
| Цена: | 1500$ |
| стандартная упаковка: | 169 см (В), 75 см (Ш), 30 см (Д) |
| Срок доставки: | 1 месяц |
| Пропускная способность: | 99 единиц |
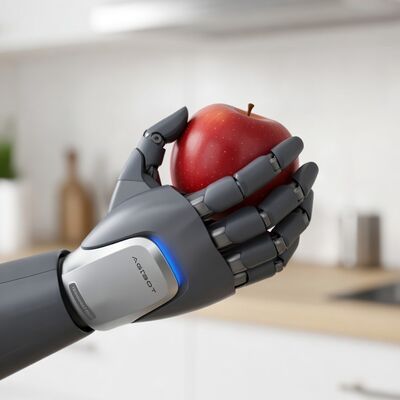
Новый AGIBOT OmniHand Pro 2025 Пятипальцовый гуманоидный робот-рука - это продвинутый роботизированный конечный эффект, предназначенный для имитации движения человеческой руки с точностью и гибкостью.Эта пятипальцовая робот-рука поддерживает координацию движений пальцев, высокоточное захват и интеллектуальная обратная связь силы для сложных задач манипуляции.
OmniHand Pro 2025 подходит для гуманоидных роботов, сервисных роботов, исследовательских платформ и промышленных роботизированных рук, которые требуют естественного движения рук.адаптивная обработка объектов и безопасное взаимодействие человека и робота.
Каждый палец может двигаться самостоятельно, чтобы выполнять естественное захват и манипуляции, аналогичные движению человеческой руки.
Интегрированные силовые и тактильные датчики позволяют адаптивно управлять сцеплением на основе формы объекта, веса и хрупкости.
Плавный и точный контроль нескольких суставов поддерживает деликатную обработку и сложные задачи манипуляции.
Передовые алгоритмы цифрового управления позволяют быстро реагировать на движение и регулировать в режиме реального времени для стабильной работы.
Поддерживает интеграцию с гуманоидными роботами, роботизированными руками и сервисными роботами посредством стандартной связи и монтажных интерфейсов.
Гибкие варианты конфигурации позволяют настроить для конкретных задач или роботизированных систем.
| Положение | Спецификация |
|---|---|
| Тип продукции | Пятипальцовая гуманоидная робот-рука |
| Степень свободы | Многосочлененные независимые пальцы |
| Метод контроля | Интеллектуальное цифровое управление |
| Ощущение | Сила и тактильная обратная связь |
| Совместимость | Гуманоидные роботы и роботизированные руки |
| Коммуникация | Стандартные робототехнические интерфейсы |
| Интеграция | Модульная установка и управление |
| Силовое питание | Внешняя система питания |
| Окружающая среда | Внутренние промышленные и исследовательские помещения |
Спецификации могут отличаться в зависимости от конфигурации.
AGIBOT OmniHand Pro 2025 сочетает в себе человекоподобную механическую конструкцию с интеллектуальным сенсорным и управляющим оборудованием для поддержки следующего поколения гуманоидных роботов и передовых робототехнических платформ.Он обеспечивает высокую производительность манипуляции и повышенную гибкость для будущих приложений.
Это пятипальцовая гуманоидная робот-рука, предназначенная для продвинутой манипуляции и человекоподобного движения в робототехнике.
Да, он поддерживает интеграцию с гуманоидными роботами, роботизированными руками и сервисными роботами с использованием стандартных интерфейсов.
Он может выполнять захват, обработку, манипулирование предметами и деликатные задачи, требующие точности и адаптивного управления.
Интегрированные силовые и тактильные датчики позволяют адаптивно управлять сцеплением на основе обратной связи.
Да, он широко используется в лабораториях по исследованию ИИ-робототехники и учебных средах для изучения передовых манипуляций.
Его модульная конструкция позволяет настроить его для различных приложений и системных требований.
|
|
| МОК: | 1 |
| Цена: | 1500$ |
| стандартная упаковка: | 169 см (В), 75 см (Ш), 30 см (Д) |
| Срок доставки: | 1 месяц |
| Пропускная способность: | 99 единиц |
Новый AGIBOT OmniHand Pro 2025 Пятипальцовый гуманоидный робот-рука - это продвинутый роботизированный конечный эффект, предназначенный для имитации движения человеческой руки с точностью и гибкостью.Эта пятипальцовая робот-рука поддерживает координацию движений пальцев, высокоточное захват и интеллектуальная обратная связь силы для сложных задач манипуляции.
OmniHand Pro 2025 подходит для гуманоидных роботов, сервисных роботов, исследовательских платформ и промышленных роботизированных рук, которые требуют естественного движения рук.адаптивная обработка объектов и безопасное взаимодействие человека и робота.
Каждый палец может двигаться самостоятельно, чтобы выполнять естественное захват и манипуляции, аналогичные движению человеческой руки.
Интегрированные силовые и тактильные датчики позволяют адаптивно управлять сцеплением на основе формы объекта, веса и хрупкости.
Плавный и точный контроль нескольких суставов поддерживает деликатную обработку и сложные задачи манипуляции.
Передовые алгоритмы цифрового управления позволяют быстро реагировать на движение и регулировать в режиме реального времени для стабильной работы.
Поддерживает интеграцию с гуманоидными роботами, роботизированными руками и сервисными роботами посредством стандартной связи и монтажных интерфейсов.
Гибкие варианты конфигурации позволяют настроить для конкретных задач или роботизированных систем.
| Положение | Спецификация |
|---|---|
| Тип продукции | Пятипальцовая гуманоидная робот-рука |
| Степень свободы | Многосочлененные независимые пальцы |
| Метод контроля | Интеллектуальное цифровое управление |
| Ощущение | Сила и тактильная обратная связь |
| Совместимость | Гуманоидные роботы и роботизированные руки |
| Коммуникация | Стандартные робототехнические интерфейсы |
| Интеграция | Модульная установка и управление |
| Силовое питание | Внешняя система питания |
| Окружающая среда | Внутренние промышленные и исследовательские помещения |
Спецификации могут отличаться в зависимости от конфигурации.
AGIBOT OmniHand Pro 2025 сочетает в себе человекоподобную механическую конструкцию с интеллектуальным сенсорным и управляющим оборудованием для поддержки следующего поколения гуманоидных роботов и передовых робототехнических платформ.Он обеспечивает высокую производительность манипуляции и повышенную гибкость для будущих приложений.
Это пятипальцовая гуманоидная робот-рука, предназначенная для продвинутой манипуляции и человекоподобного движения в робототехнике.
Да, он поддерживает интеграцию с гуманоидными роботами, роботизированными руками и сервисными роботами с использованием стандартных интерфейсов.
Он может выполнять захват, обработку, манипулирование предметами и деликатные задачи, требующие точности и адаптивного управления.
Интегрированные силовые и тактильные датчики позволяют адаптивно управлять сцеплением на основе обратной связи.
Да, он широко используется в лабораториях по исследованию ИИ-робототехники и учебных средах для изучения передовых манипуляций.
Его модульная конструкция позволяет настроить его для различных приложений и системных требований.