

|
|
Робот CNC руки IRB4600 робота ABB с электрическим gripper для работы выбора и места с гибочной машиной

| Версия робота | Повторимость RP положения (mm) | Повторимость RT пути (mm) * |
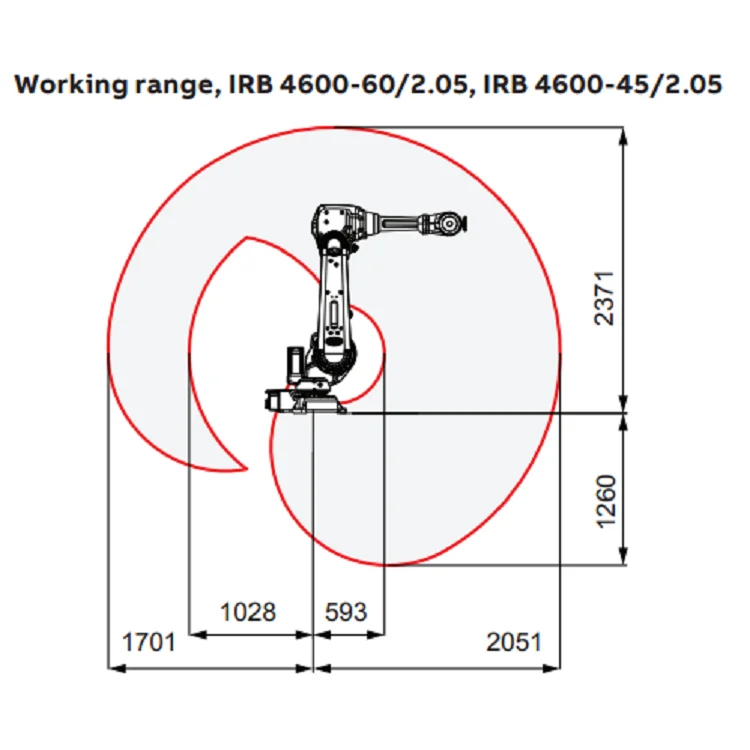
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
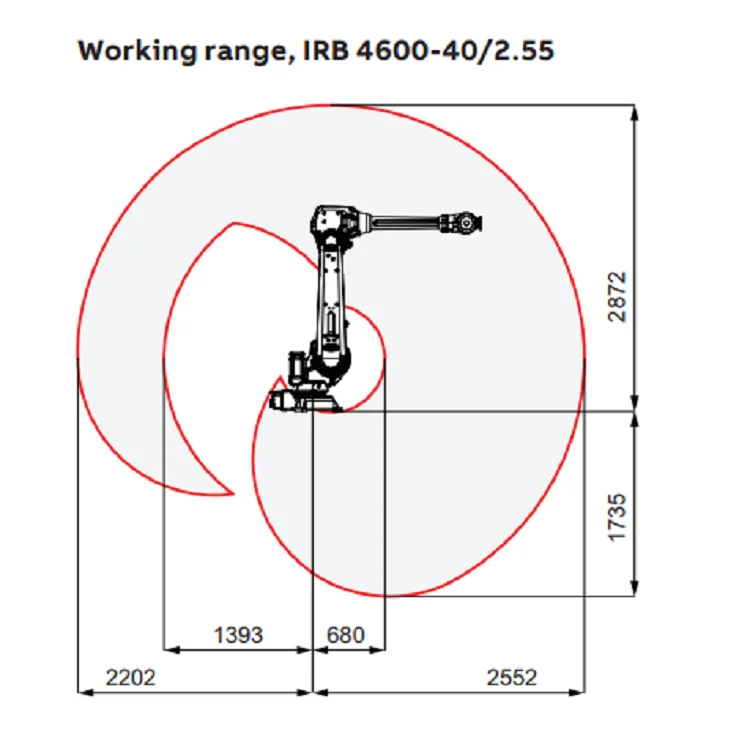
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Версии робота | Достигаемость (m) | Полезная нагрузка (kg) | Armload (kg) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Количество осей | 6+3 внешнее (до 36 с MultiMove) | |||
| Защита | Стандартное IP67, как плавильня варианта плюс 2 | |||
| Установка | Пол, опрокинутая полка, перевернутая или | |||
| Регулятор | Одиночный шкаф IRC5, | |||

|
|
Робот CNC руки IRB4600 робота ABB с электрическим gripper для работы выбора и места с гибочной машиной
| Версия робота | Повторимость RP положения (mm) | Повторимость RT пути (mm) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Версии робота | Достигаемость (m) | Полезная нагрузка (kg) | Armload (kg) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Количество осей | 6+3 внешнее (до 36 с MultiMove) | |||
| Защита | Стандартное IP67, как плавильня варианта плюс 2 | |||
| Установка | Пол, опрокинутая полка, перевернутая или | |||
| Регулятор | Одиночный шкаф IRC5, | |||


